Les calculs de
trigonométrie sphérique
Préparez les TI et, un conseil, enregistrez cette page.
Bonne chance !!!
Cette page n´aurais jamais put être aussi claire sans les conseils et les dessins de Maurice Thiébaut, nous ne pouvons que le remercier.
Avant propos :
Ce document a pour
but de démontrer les calculs trigonométriques très utilisés
en astronomie.
Il doit normalement être du niveau 1ère S ( et lycée tout
court car j'expliquerais prochainement les principaux axiomes :
la configuration des sinus et cosinus ainsi que le produit
scalaire).
La trigonométrie est l'étude
des relations entre les angles d'un triangle, son but est de
fournir des équations simples pour trouver les donnés qui nous
manquent. La trigonométrie peut ainsi permettre de connaître la
distance d'une étoile, de calculer la phase d'une planète ou de
la lune... Pourtant, pour changer de coordonnées célestes, la trigonométrie
simple n'est plus utilisable, il faut travailler dans le triangle
sphérique. Mais qu'est-ce qu'un triangle sphérique ???
Le principe est simple. Un triangle sphérique
est la plus petite portion d'une sphère limitée par 3 grands
cercles (cercles centrés en O ( centre de la sphère) et de rayons celui de la sphère); cette définition étant un peu barbare, on simplifiera
les choses en dessinant un triangle sur une feuille que l'on
posera sur quelque chose de sphérique (ballon ...). Les lignes
droites étant transformées en courbes (dont le prolongement sera
un cercle de même rayon que la sphère) .
 Les
trois points sur la sphère délimitent le triangle sphérique.
Les
trois points sur la sphère délimitent le triangle sphérique.
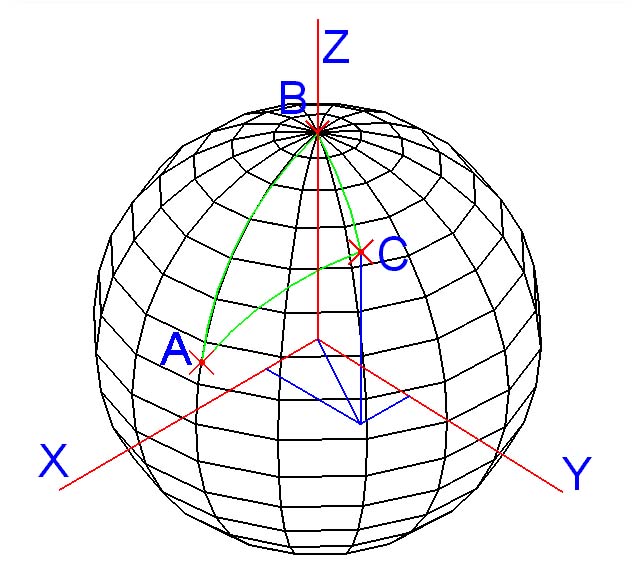
L'image ci-dessus présente la sphère dans
sa configuration initiale : B est sur un pôle de l'axe z
, A est un point d'intersection de la sphère avec le plan
passant par les axes z et x.
Par définition, les angles du triangle
sont notés A,B et C donc l´angle ABC sera noté B, BAC sera noté A... . Le coté opposé à un angle a la même
dénomination que celui-ci mais en minuscule. Le côté BC sera ainsi nommé
a et BA sera nommé c. Comme on est sur une sphère de rayon 1, on peut confondre un coté et un angle, ainsi a=BOC ...Attention, B est différent de b et ainsi de suite...
Pour faciliter les calculs, nous parlerons en radians (PI rad=180°) et on prendra une sphère de rayon 1.
Notre but est de calculer
les coordonnées x,y,z de C situé sur un point quelconque de la
sphère. On les recalculera avec un repère différent, et après
avoir rendu les données compatibles (changement de repère), on
pourra les écrire comme équivalentes. Ces relations seront celles
de trigonométrie sphérique.
Vous constaterez que chaque
figure est représentée deux fois. Grâce à ce petit artifice,
nous pourrons nous représenter une sphère. En effet, cela nous
permet d'avoir une coordonnée en z et en y sur le 1er schéma et
le 2ème, avec une coordonnée déjà connue, nous permettra de
connaître x. Ces projections ne changeront pas la valeur des
angles A,B,C (ou de manière négligeable, (ce litige est à démontrer, un exercice pour vous; solution en annexe)).
1:
COORDONEES DE C
fig1a
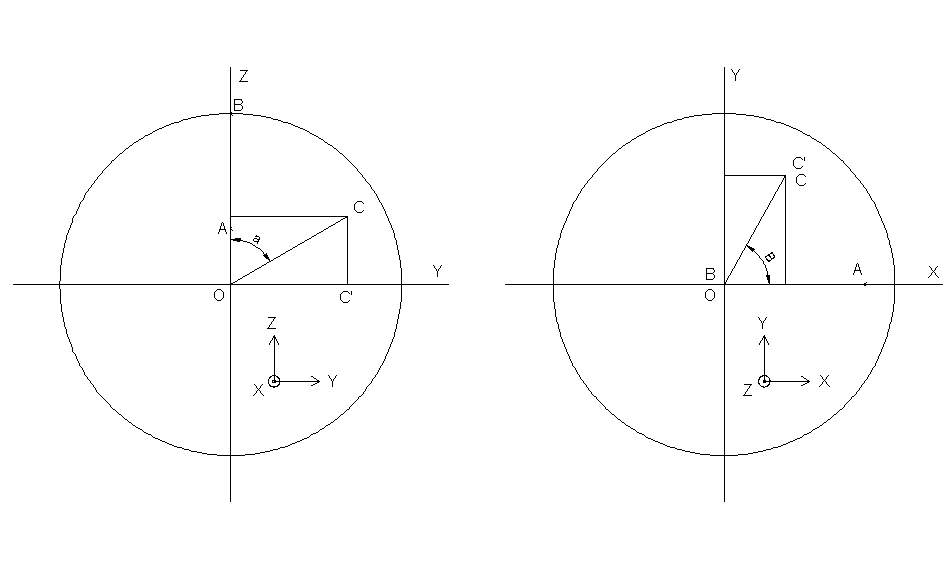 fig1b
fig1b
On ne le rappelera pas assez : A est un point sur la sphère dans le plan xOz, il n´est pas mis avec un angle droit car on perdrait de l´information : angle C non quelconque .
La projection de C sur le
plan y x est nommée C'. Pour trouver les coordonées y et x il
faut trouver la valeur OC' . Après, cela se rapporte à un
calcul de trigonométrie normale (fig 1b).
Par définition, l'angle BOC est a. La fig1a
nous montre un triangle tout ce qui a de plus simple. ( La projection fig1a n´est pas tout a fait exacte, en fait,ce n´est pas le plan xOy mais le plan COB, cela n´influe en rien sur les calculs ). On calcule
grâce à lui z et OC':
z= sin(C'OC) = sin(PI/2-a)=cos a
OC'=cos(C'OC)= cos(PI/2-a)=sin a
Rappel : sinus = côté
opposé/ hypoténuse; cosinus = côté adjacent/hypoténuse
donc : sinus*hypoténuse=côté
opposé; cosinus*hypoténuse= côté adjacent.
Pourquoi utilise-t-on l´angle B dans la projection fig1b au lieu de b? Il faut se rendre compte que notre triangle est sphérique, soit en 3D et on veut calculer ABC´. Si on utilisait b, comme A et C ne sont pas obligatoirement dans le plan xOy, on peut avoir un angle beaucoup plus grand que celui de la projection...Il nous faut donc un angle qui soit correct par cette projection, c´est B ( voir ci-dessous).
Pour trouver les coordonnées de C, on n´a plus qu´à calculer les coordonnées de C´ dans le plan xOy, sachant que la longueur de l´hypothénuse est sin a, on en déduit les coordonnées du point C :
x =OC'* cos(ABC)= sin a * cos B ;
y =OC'* sin(ABC)= sin a*sin B ;
z = cos a ;
Après, on fait tourner la
sphère autour de l'axe y de manière à ce que A remplace B. Pour les puristes, on choisit un nouveau repère orthonormé direct centré sur O, avec des vecteurs unitaires de même norme que le précédent, dont l´axe des ordonnées est aussi le même et dont le nouvel axe des z est OA. Ce
qui nous donne :
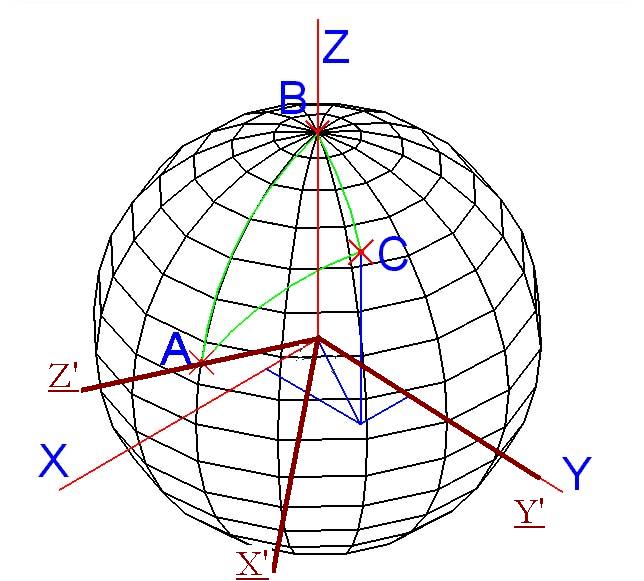 Nous avons notre nouveau repère orthonormé : (O,X',Y',Z').
Nous avons notre nouveau repère orthonormé : (O,X',Y',Z').
Fig2a
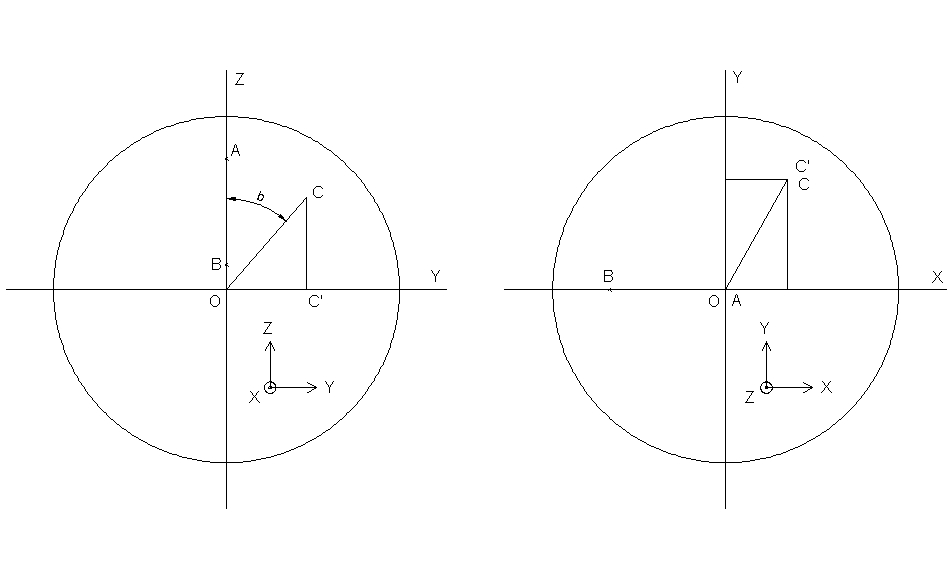 fig2b
fig2b
On remarque que c´est le même
type de projection qu´on a utilisé précédemment, avec la même erreur sur la fig 2a : on a projeté sur le plan ZOC et non ZOY . On aura donc :
z' =sin(C'OC)=sin(Pi/2-b)= cos b;
OC' =cos(C'OC)=cos(Pi/2-b)= sin b;
Par contre, du fait que le
A dans 1b n'est pas du même côté que B dans 2b, on ne parlera
pas de cos ou sin A mais de cos ou sin PI-A. Or, suivant la
configuration des sinus et cosinus, cos(PI-A)= -cos A, sin PI-A=sin
A. Donc les relations seront :
x'=OC' * cos(XAC)= sin b*cos(PI-A)=-sin b*cos
A;
y'= OC' * sin(XAC)=sin b *sin (PI-A)=sin b*sin
A;
z'=cos b;
2 : LES
RELATIONS DE TRIGONOMETRIE SPHERIQUE
On utilise les relations de
changements de repère ( voir annexe) qui sont :
x= x'*cos c +z'*sin c
y= y'
z= z'*cos c-x'*sin c
Remarque : cette formule a été déduite de l´annexe en remplaçant y(annexe) par x et x(annexe) par z en effet, pour que les formules de l´annexe s´appliquent, il faut être dans une base (x,y,z)directe.
On laisse les formules 1 inchangées:
x= sin a*cos B;
y= sin a*sin B;
z= cos a ;
Et on change les formules 2 :
x= cos b*sin c -sin b* cos
c *cos A ;
y= sin b * sin A;
z= cos b*cos c+sin b*sin c*cos
A;
On a donc deux formules de coordonnées de C dans le même repère, elles sont égales, il suffit de remplacer x et on trouve :
Les formules de
trigonométrie sphérique :
sin a*cos B=
cos b*sin c -sin b* cos c *cos A ;
sin a*sin B=
sin b * sin A;
cos a = cos b*cos
c+sin b*sin c*cos A ;
A noter : la
seconde est peu utilisée.
Annexe : formules de changement de repère :
Ceci est un cours que l'on voit en exemple en 1ère S. Mais avec un cercle !
Pourtant, c'est celui que nous allons utiliser. En effet, nous avons fait tourner la sphère autour de l'axe y . Donc, en faisant une projection de manière à ne voir que les x et les z, nous aurons notre cercle!!!
Cela nous donne :

On a C,B et B' qui sont sur le cercle . (OB) est perpendiculaire à (OC).
Nous avons dans ce schéma 2 systèmes de cordonnées :
1) le système de cordonnées initial, centré sur O, d'abscisse l'axe OB et dordonnée l'axe OC .
2) le système de cordonnées finales, centré sur O, d'abscisse l'axe OX et dordonnée l'axe OZ ( on notera OY par la suite).
Notre but est de trouver les coordonnées de B' à partir des coordonnées de B et de l'angle alpha , BOB' il est direct ( sens inverse des aiguilles dune montre) sur le schéma, sil nétait pas direct, alpha serait négatif, les formules restant valables.
On commence par calculer les cordonnées de B' dans le système 1 que l'on notera (X,Y) ; on notera [OB'] la longueur entre O et B' :
X = [OB'] *cos alpha ;
Y = [OB'] * sin alpha ;
Un vecteur est une flèche donnant une norme (longueur), un sens et une direction. Si on multiplie un vecteur par un entier, on multiplie sa norme par cet entier et on aura un autre vecteur de même sens, même direction et avec la nouvelle norme, plus intuitivement, cest comme si on
étirait le vecteur . On dit que les coordonnées d'un point sont la projection de celui-ci sur le vecteur I ( la notation du vecteur en gras est souvent utilisée dans les livres ).
Par exemple, si on prend A(x,y), quelconque on peut dire que les cordonnées de A sont :
A= x *
I + y * J;
(Remarque, dans la base (O,
I,J).
Prenons la base (O
,I,J) avec I vecteur unitaire de direction Ox , J vecteur unitaire de direction Oy.
On aura donc pour OB' :
OB
= [OB'] * cos alpha * OB + [OB']* sin alpha * OC; Attention de ne pas confondre OB et OB.
Mais, par définition, [OC] = [OB] =[OB'] , on peut donc écrire :
OB'
= cos alpha * OB + sin alpha * OC
Or,
OB = x * I + y * J ; et, comme OC lui est perpendiculaire OC = -y * I + x * J . ( en effet pour A(x,y) et B(x',y') perpendiculaires. On a, par définition, x*x' + y'*y = 0).
On aura donc :
OB'
= x*cos alpha*I + y * cos alpha*J - y * sin alpha* I +x * sin alpha *J
OB'
= (x*cos alpha- y*sin alpha) I + ( y*cos alpha + x*sin alpha) J
Ce qui est équivalent à :
X(OB')= x*cos alpha- y*sin alpha
Y(OB')= y*cos alpha+ x*sin alpha
Donc les changements de cordonnées se feront ainsi, le nouveau x, NX sera l'équivalent de
x*cos alpha - y sin alpha et le nouveau y, NY sera l'équivalent de y*cos alpha+ x*sin alpha CQFD .
Pour ceux qui sont allergiques aux vecteurs voilà une autre idée de démo proposée par Maurice THIEBAUT :
Les formules qui permettent de trouver les coordonnées après un changement d'axe.
Rotation autour de l'axe Y d'un angle C.
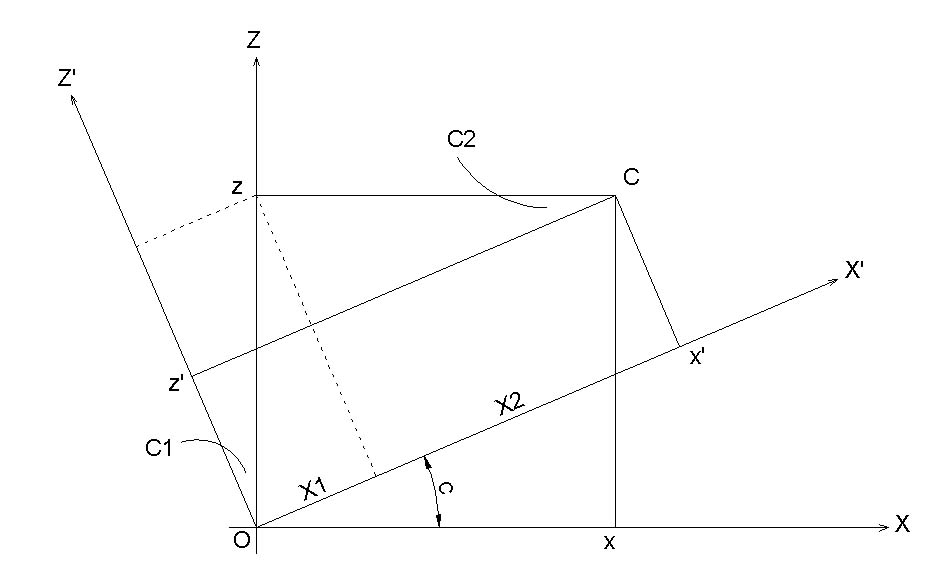
Trouver la valeur de x'
x' = X1 + X2
sin C1 = X1 / Z X1 = Z sin C
cos C2 = X2 / X X2 = X cos C
x' = x cos C + z sin C

Trouver la valeur de z'
z' = z1 Δz
cos C1 = z1 / z z1 = z cos C
sin C2 = Δz / x Δz = x sin C
z' = z cos C x sin C
On trouve donc bien le même résultat
Mais comment faire les changements inverses ?
Il suffit de remplacer langle C par C et on trouve x= x cos C z sin C ; z = z cos C + x sin C. CQFD.
Solution de l´exercice
Un cercle sur une sphère trigonométrique peut être considéré comme l'intersection d'un plan et de cette sphère.Or un plan vu de côté est une ligne et deux lignes ont un angle normal. Vu que l'on s'occupe de grands cercles, une bonne projection donnera les angles normaux. Comme la projection de l'angle se fait dans la dimension perpendiculaire au plan de l'angle (on voit les grands cercles comme des segments ) il n'y a pas de changement,CQFD .
les calculs de trigonométrie sphérique
Reposez-vous un peu d'abord!!!
Bonne chance !!!
